
Pengyuan Wang
About Me
I am Pengyuan Wang, an undergraduate student in Robotics Engineering (Honors Program) at Zhejiang University, expected to graduate in 2027. Currently, I am a research intern at the THU Spatial Intelligence Lab, working with Prof. Yiming Li.
My long-term research vision is to develop machine learning-based control for dynamic systems, encompassing reinforcement learning, imitation learning, and the perception-action loop, to achieve high-level autonomy. I aim to fully leverage the hardware advantages of diverse robotic platforms to enable safe and autonomous deployment in both industrial and daily-life settings.
My recent work spans humanoid locomotion and soccer control, autonomous terrain exploration, agile UAV control, and embedded systems for RoboMaster robots.
RESEARCH PROJECTS
-
 End-to-End Humanoid Soccer Control via Depth-Based Active PerceptionDeveloped an end-to-end RL framework for a 25-DOF humanoid to perform complex soccer maneuvers. Integrated depth-based active perception and auxiliary prediction heads for robust sim-to-real hardware deployment.ongoing
End-to-End Humanoid Soccer Control via Depth-Based Active PerceptionDeveloped an end-to-end RL framework for a 25-DOF humanoid to perform complex soccer maneuvers. Integrated depth-based active perception and auxiliary prediction heads for robust sim-to-real hardware deployment.ongoing -
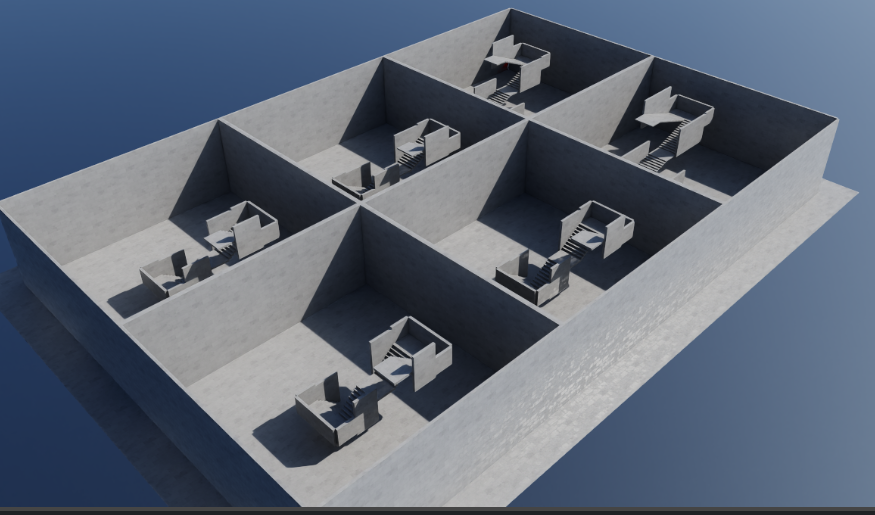 Autonomous Humanoid Exploration in Multi-Level TerrainsDesigned a goal-free heuristic exploration policy for a 25-DOF humanoid using active depth sensing. Synthesized competitive reward dynamics to induce emergent, terrain-adaptive locomotion across complex environments.ongoing
Autonomous Humanoid Exploration in Multi-Level TerrainsDesigned a goal-free heuristic exploration policy for a 25-DOF humanoid using active depth sensing. Synthesized competitive reward dynamics to induce emergent, terrain-adaptive locomotion across complex environments.ongoing
COMPETITIONS
-
 RoboMaster University Series: Embedded System ArchitectureArchitected the embedded software and multi-layer state machines for heterogeneous competitive robots. Developed high-bandwidth bit-field protocols and cascaded PID controllers to ensure deterministic, high-speed motion control.
RoboMaster University Series: Embedded System ArchitectureArchitected the embedded software and multi-layer state machines for heterogeneous competitive robots. Developed high-bandwidth bit-field protocols and cascaded PID controllers to ensure deterministic, high-speed motion control.
ENGINEERING PROJECTS
-
 General Motion Tracking on Noetix E1 Humanoid PlatformReproduced and optimized General Motion Tracking frameworks (BeyondMimic/HoloMotion) via Isaac Lab. Leveraged adaptive sampling and robust sim-to-real pipelines to achieve stable whole-body imitation of high-dynamic dance sequences.
General Motion Tracking on Noetix E1 Humanoid PlatformReproduced and optimized General Motion Tracking frameworks (BeyondMimic/HoloMotion) via Isaac Lab. Leveraged adaptive sampling and robust sim-to-real pipelines to achieve stable whole-body imitation of high-dynamic dance sequences. -
 Agile UAV Flight Control via Deep Reinforcement LearningBuilt a high-mobility UAV control stack bridging PPO-based RL and cascaded PID. Achieved autonomous agile maneuvers (e.g., figure-8) using extensive domain randomization for robust sim-to-real hardware transfer.
Agile UAV Flight Control via Deep Reinforcement LearningBuilt a high-mobility UAV control stack bridging PPO-based RL and cascaded PID. Achieved autonomous agile maneuvers (e.g., figure-8) using extensive domain randomization for robust sim-to-real hardware transfer.